Ground vehicle modeling and simulation.
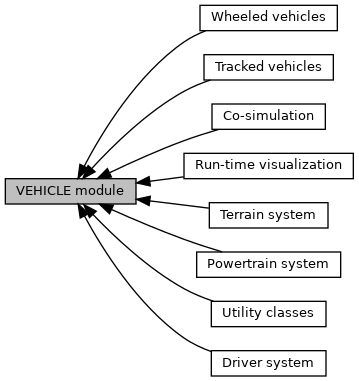
This module introduces template-based modeling tools for creating wheeled and tracked vehicles.
|
| enum | chrono::vehicle::VehicleSide { chrono::vehicle::LEFT = 0,
chrono::vehicle::RIGHT = 1
} |
| | Enum for the side (left/right) of a vehicle. More...
|
| |
| enum | chrono::vehicle::WheelLocation { chrono::vehicle::SINGLE = 0,
chrono::vehicle::INNER = 1,
chrono::vehicle::OUTER = 2
} |
| | Enum for wheel location on spindle. More...
|
| |
| enum | chrono::vehicle::VisualizationType { chrono::vehicle::VisualizationType::NONE,
chrono::vehicle::VisualizationType::PRIMITIVES,
chrono::vehicle::VisualizationType::MESH
} |
| | Enum for visualization types. More...
|
| |
| enum | chrono::vehicle::TireModelType {
chrono::vehicle::TireModelType::RIGID,
chrono::vehicle::TireModelType::RIGID_MESH,
chrono::vehicle::TireModelType::FIALA,
chrono::vehicle::TireModelType::ANCF,
chrono::vehicle::TireModelType::REISSNER,
chrono::vehicle::TireModelType::FEA,
chrono::vehicle::TireModelType::PAC89,
chrono::vehicle::TireModelType::TMEASY,
chrono::vehicle::TireModelType::PAC02,
chrono::vehicle::TireModelType::TMSIMPLE
} |
| | Enum for available tire models. More...
|
| |
| enum | chrono::vehicle::EngineModelType { chrono::vehicle::EngineModelType::SHAFTS,
chrono::vehicle::EngineModelType::SIMPLE_MAP,
chrono::vehicle::EngineModelType::SIMPLE
} |
| | Enum for available engine model templates. More...
|
| |
| enum | chrono::vehicle::TransmissionModelType { chrono::vehicle::TransmissionModelType::AUTOMATIC_SHAFTS,
chrono::vehicle::TransmissionModelType::AUTOMATIC_SIMPLE_MAP,
chrono::vehicle::TransmissionModelType::MANUAL_SHAFTS
} |
| | Enum for available transmission model templates. More...
|
| |
| enum | chrono::vehicle::SuspensionTypeWV {
chrono::vehicle::SuspensionTypeWV::DOUBLE_WISHBONE,
chrono::vehicle::SuspensionTypeWV::DOUBLE_WISHBONE_REDUCED,
chrono::vehicle::SuspensionTypeWV::HENDRICKSON_PRIMAXX,
chrono::vehicle::SuspensionTypeWV::LEAF_SPRING_AXLE,
chrono::vehicle::SuspensionTypeWV::SAE_LEAF_SPRING_AXLE,
chrono::vehicle::SuspensionTypeWV::MACPHERSON_STRUT,
chrono::vehicle::SuspensionTypeWV::MULTI_LINK,
chrono::vehicle::SuspensionTypeWV::RIGID_PINNED,
chrono::vehicle::SuspensionTypeWV::RIGID_SUSPENSION,
chrono::vehicle::SuspensionTypeWV::SEMI_TRAILING_ARM,
chrono::vehicle::SuspensionTypeWV::SOLID_AXLE,
chrono::vehicle::SuspensionTypeWV::SOLID_THREE_LINK_AXLE,
chrono::vehicle::SuspensionTypeWV::SOLID_BELLCRANK_THREE_LINK_AXLE,
chrono::vehicle::SuspensionTypeWV::THREE_LINK_IRS,
chrono::vehicle::SuspensionTypeWV::TOE_BAR_LEAF_SPRING_AXLE,
chrono::vehicle::SuspensionTypeWV::SAE_TOE_BAR_LEAF_SPRING_AXLE,
chrono::vehicle::SuspensionTypeWV::PUSHPIPE_AXLE,
chrono::vehicle::SuspensionTypeWV::TOEBAR_PUSHPIPE_AXLE
} |
| | Enum for available wheeled-vehicle suspension model templates. More...
|
| |
| enum | chrono::vehicle::BrakeType { chrono::vehicle::BrakeType::SHAFTS,
chrono::vehicle::BrakeType::SIMPLE
} |
| | Enum for available brake model templates. More...
|
| |
| enum | chrono::vehicle::SteeringTypeWV { chrono::vehicle::SteeringTypeWV::PITMAN_ARM,
chrono::vehicle::SteeringTypeWV::PITMAN_ARM_SHAFTS,
chrono::vehicle::SteeringTypeWV::RACK_PINION
} |
| | Enum for available wheeled-vehicle steering model templates. More...
|
| |
| enum | chrono::vehicle::DrivelineTypeWV {
chrono::vehicle::DrivelineTypeWV::FWD,
chrono::vehicle::DrivelineTypeWV::RWD,
chrono::vehicle::DrivelineTypeWV::AWD,
chrono::vehicle::DrivelineTypeWV::AWD6,
chrono::vehicle::DrivelineTypeWV::AWD8,
chrono::vehicle::DrivelineTypeWV::SIMPLE,
chrono::vehicle::DrivelineTypeWV::SIMPLE_XWD
} |
| | Enum for wheeled-vehicle driveline types. More...
|
| |
| enum | chrono::vehicle::DrivelineTypeTV { chrono::vehicle::DrivelineTypeTV::BDS,
chrono::vehicle::DrivelineTypeTV::SIMPLE
} |
| | Enum for tracked-vehicle driveline types. More...
|
| |
| enum | chrono::vehicle::TrackShoeType { chrono::vehicle::TrackShoeType::SINGLE_PIN,
chrono::vehicle::TrackShoeType::DOUBLE_PIN,
chrono::vehicle::TrackShoeType::BAND_BUSHING,
chrono::vehicle::TrackShoeType::BAND_ANCF
} |
| | Enum for track shoe types. More...
|
| |
| enum | chrono::vehicle::DoublePinTrackShoeType { chrono::vehicle::DoublePinTrackShoeType::TWO_CONNECTORS,
chrono::vehicle::DoublePinTrackShoeType::ONE_CONNECTOR
} |
| | Topology of the double-pin track shoe. More...
|
| |
| enum | chrono::vehicle::GuidePinType { chrono::vehicle::GuidePinType::CENTRAL_PIN,
chrono::vehicle::GuidePinType::LATERAL_PIN
} |
| | Enum for guide pin (track shoe/roadwheel/idler). More...
|
| |
| enum | chrono::vehicle::OutputInformation { chrono::vehicle::OUT_SPRINGS = 1 << 0,
chrono::vehicle::OUT_SHOCKS = 1 << 1,
chrono::vehicle::OUT_CONSTRAINTS = 1 << 2,
chrono::vehicle::OUT_TESTRIG = 1 << 3
} |
| | Flags for output (log/debug). More...
|
| |
| enum | chrono::vehicle::TrackedVehicleBodyTag {
CHASSIS_BODY = -99990,
SPROCKET_BODY = -99991,
IDLER_BODY = -99992,
WHEEL_BODY = -99993,
ROLER_BODY = -99994,
SHOE_BODY = -99995
} |
| | Tags for specific component bodies.
|
| |