The Chrono::Sensor module provides support for simulating RGB cameras, lidar, radar, GPS, and accelerometer, gyroscope, and magnetometer within a Chrono simulation. Sensors are objects that are attached to Chrono Bodies(ChBody). Chrono::Sensor is currently compatible with the core rigid body simulation in Chrono including Chrono::Vehicle. It's also compatible with the SCMTerrain, but it's not yet compatible with FSI problems. A full list of supported capabilities are listed.
Supported Sensors
- RGB monocular camera
- Physics-based RGB monocular camera
- Depth camera
- Segmentation camera
- Normal-map camera
- Lidar
- GPS
- IMU
Current Capabilities
- Scene Rendering
- Lights
- Point light
- Spot light
- Directional light
- Rectangle area light
- Disk area light
- Environment light
- Shadows
- Materials
- Reflection based on material reflectance
- Fresnel effect
- Mesh support based on Wavefront OBJ+MTL format
- Programmatic material creation
- Legacy integrator supports partial transparency without refractance
- Objects
- Box primitives
- Sphere primitives
- Cylinder primitives
- Triangle Mesh
- Lights
- Camera sensor
- Ground-truth ray-traced camera rendering
- Filter-based sensor model for user defined sensor model
- Filters
- Greyscale kernel
- Visualization using GLFW
- Copy-back filter for data access from CPU
- Save images to file at a specific path
- Convert lidar measurements to point cloud
- Lidar Sensor
- Single ray and multi-ray data generation
- GPS Sensor
- IMU Sensor
- Accelerometer and Gyroscope
Detailed overview of Chrono::Sensor.
How the sensor system is setup (more examples can be found in the sensor demos)
Chrono::Sensor design considerations
Since dynamic chrono simulations typically have a higher update frequency than sensors (dynamics: order 1kHz; sensors: 10-100Hz), the sensor framework uses a separate thread to manage the data curation.

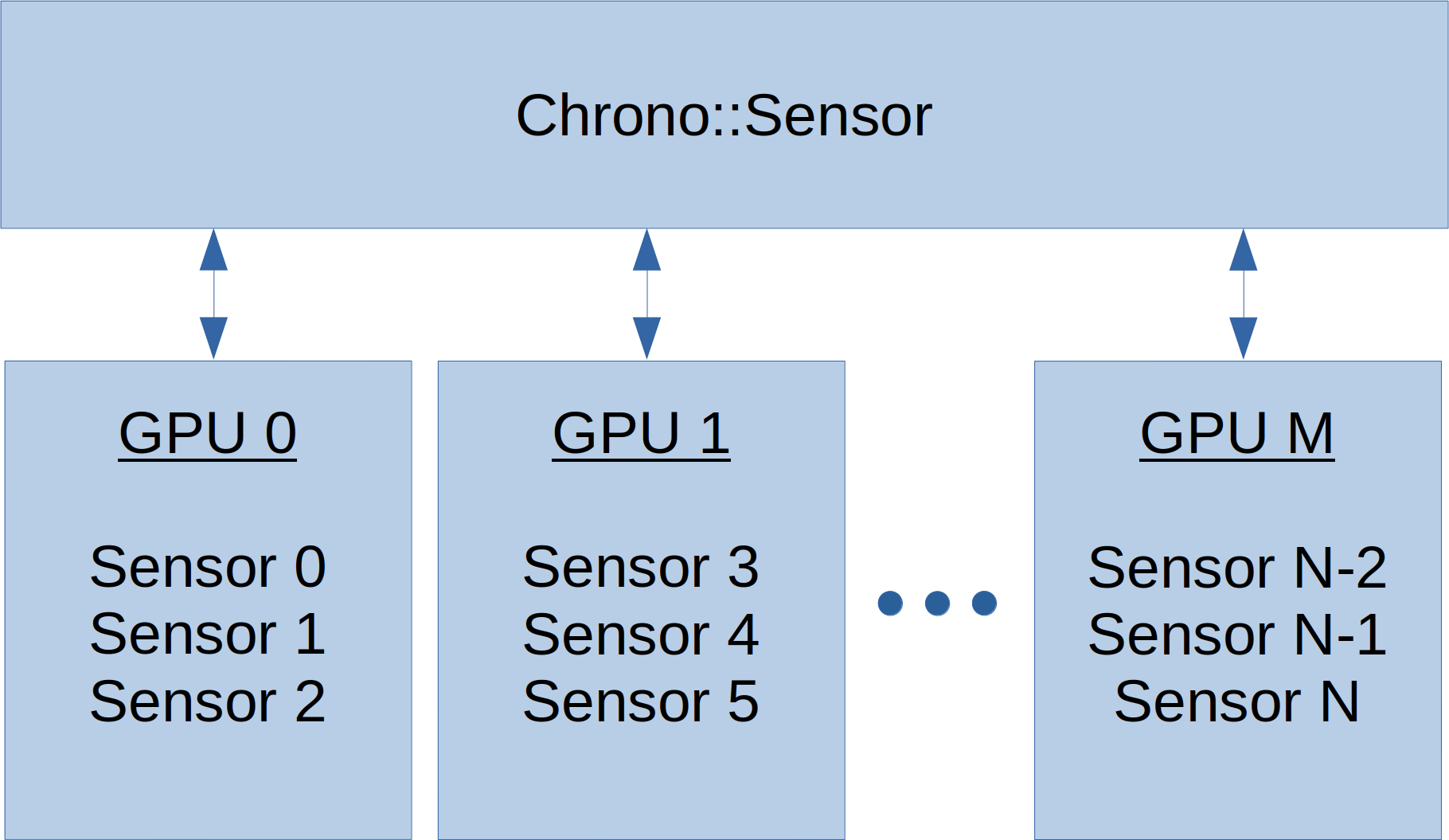
Chrono::Sensor can leverage multiple render threads each managing a separate GPU for simulating a group of sensors. This is particularly useful for scenarios with multiple agents and numerous sensors that operate at various update frequencies.
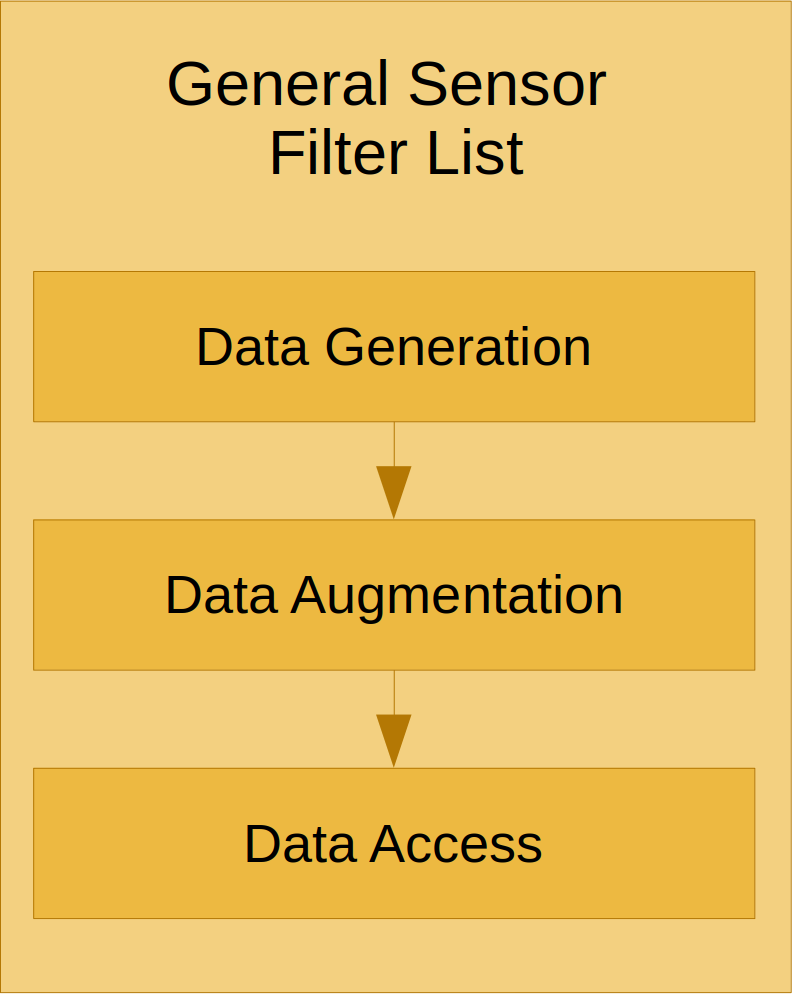
Each sensor has a filter graph which users can extend to customize the computation pipeline for modeling specific sensor attributes or configuring specific data formats.
Loading sensor models from JSON Files
Reference Frames and Relative Attachment Positions
Each Chrono sensor defaults to Z-up, X-forwad, and Y-left to match a vehicle ISO reference frame. For an RGB camera, this means that the z-axis points vertically in the image plane, the y-axis points left in the image plane, and the x-axis points into the image plane. For lidar, the x-axis point along rays with zero vertical angle and zero horizontal angle
