chrono::vehicle::MFTire Class Reference
Description
PAC89 tire model from JSON file.
#include <MFTire.h>
Inheritance diagram for chrono::vehicle::MFTire:
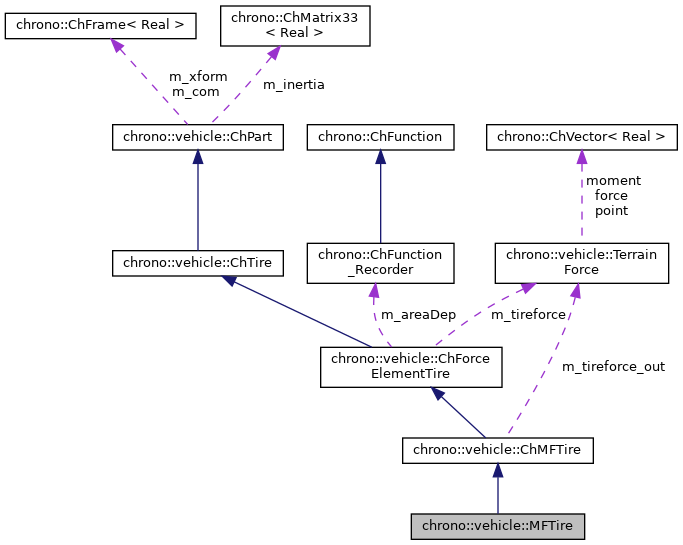
Collaboration diagram for chrono::vehicle::MFTire:
Public Member Functions | |
| MFTire (const std::string &filename) | |
| MFTire (const rapidjson::Document &d) | |
| virtual double | GetNormalStiffnessForce (double depth) const override |
| Return the vertical tire stiffness contribution to the normal force. | |
| virtual double | GetNormalDampingForce (double depth, double velocity) const override |
| Return the vertical tire damping contribution to the normal force. | |
| virtual double | GetTireMass () const override |
| Return the tire mass. | |
| virtual ChVector | GetTireInertia () const override |
| Return the tire moments of inertia (in the tire centroidal frame). | |
| virtual void | SetPac02Params () override |
| Set the parameters in the Pac89 model. | |
| virtual double | GetVisualizationWidth () const override |
| Get visualization width. | |
| virtual void | AddVisualizationAssets (VisualizationType vis) override |
| Add visualization assets for the rigid tire subsystem. | |
| virtual void | RemoveVisualizationAssets () override final |
| Remove visualization assets for the rigid tire subsystem. | |
 Public Member Functions inherited from chrono::vehicle::ChMFTire Public Member Functions inherited from chrono::vehicle::ChMFTire | |
| ChMFTire (const std::string &name) | |
| virtual void | SetMFParams () |
| virtual std::string | GetTemplateName () const override |
| Get the name of the vehicle subsystem template. | |
| virtual double | GetRadius () const override |
| Get the tire radius. | |
| void | SetGammaLimit (double gamma_limit) |
| Set the limit for camber angle (in degrees). Default: 3 degrees. | |
| virtual double | GetWidth () const override |
| Get the width of the tire. | |
| virtual double | GetDeflection () const override |
| Get the tire deflection. | |
| double | GetSlipAngle_internal () const |
| Get the slip angle used in Pac89 (expressed in radians). More... | |
| double | GetLongitudinalSlip_internal () const |
| Get the longitudinal slip used in Pac89. More... | |
| double | GetCamberAngle_internal () |
| Get the camber angle used in Pac89 (expressed in radians). More... | |
| Public Member Functions inherited from chrono::vehicle::ChForceElementTire | |
| virtual TerrainForce | ReportTireForce (ChTerrain *terrain) const override |
| Report the tire force and moment. | |
| virtual TerrainForce | ReportTireForce (ChTerrain *terrain, ChCoordsys<> &tire_frame) const override |
| Get the tire forces expressed in the tire frame. More... | |
| Public Member Functions inherited from chrono::vehicle::ChTire | |
| void | SetStepsize (double val) |
| Set the value of the integration step size for the underlying dynamics (if applicable). More... | |
| double | GetStepsize () const |
| Get the current value of the integration step size. | |
| void | SetCollisionType (CollisionType collision_type) |
| Set the collision type for tire-terrain interaction. More... | |
| double | GetSlipAngle () const |
| Return the tire slip angle calculated based on the current state of the associated wheel body. More... | |
| double | GetLongitudinalSlip () const |
| Return the tire longitudinal slip calculated based on the current state of the associated wheel body. More... | |
| double | GetCamberAngle () const |
| Return the tire camber angle calculated based on the current state of the associated wheel body. More... | |
| const std::string & | GetMeshFilename () const |
| Get the name of the Wavefront file with tire visualization mesh. More... | |
| Public Member Functions inherited from chrono::vehicle::ChPart | |
| const std::string & | GetName () const |
| Get the name identifier for this subsystem. | |
| void | SetName (const std::string &name) |
| Set the name identifier for this subsystem. | |
| bool | IsInitialized () const |
| Return flag indicating whether or not the part is fully constructed. | |
| double | GetMass () const |
| Get the subsystem mass. More... | |
| const ChFrame & | GetCOMFrame () const |
| Get the current subsystem COM frame (relative to and expressed in the subsystem's reference frame). More... | |
| const ChMatrix33 & | GetInertia () const |
| Get the current subsystem inertia (relative to the subsystem COM frame). More... | |
| const ChFrame & | GetTransform () const |
| Get the current subsystem position relative to the global frame. More... | |
| void | SetVisualizationType (VisualizationType vis) |
| Set the visualization mode for this subsystem. | |
| virtual void | SetOutput (bool state) |
| Enable/disable output for this subsystem. | |
| bool | OutputEnabled () const |
| Return the output state for this subsystem. | |
| virtual void | ExportComponentList (rapidjson::Document &jsonDocument) const |
| Export this subsystem's component list to the specified JSON object. More... | |
| virtual void | Output (ChVehicleOutput &database) const |
| Output data for this subsystem's component list to the specified database. | |
Additional Inherited Members | |
| Public Types inherited from chrono::vehicle::ChTire | |
| enum | CollisionType { SINGLE_POINT, FOUR_POINTS, ENVELOPE } |
| Static Public Member Functions inherited from chrono::vehicle::ChTire | |
| static ChVector | EstimateInertia (double tire_width, double aspect_ratio, double rim_diameter, double tire_mass, double t_factor=2) |
| Utility function for estimating the tire moments of inertia. More... | |
| Static Public Member Functions inherited from chrono::vehicle::ChPart | |
| static ChMatrix33 | TransformInertiaMatrix (const ChVector<> &moments, const ChVector<> &products, const ChMatrix33<> &vehicle_rot, const ChMatrix33<> &body_rot) |
| Utility function for transforming inertia tensors between centroidal frames. More... | |
| Protected Types inherited from chrono::vehicle::ChMFTire | |
| typedef struct chrono::vehicle::ChMFTire::TireData | TireData |
| Protected Member Functions inherited from chrono::vehicle::ChMFTire | |
| virtual void | Initialize (std::shared_ptr< ChWheel > wheel) override |
| Initialize this tire by associating it to the specified wheel. | |
| virtual void | Synchronize (double time, const ChTerrain &terrain) override |
| Update the state of this tire system at the current time. More... | |
| virtual void | Advance (double step) override |
| Advance the state of this tire by the specified time step. | |
| void | CopyContactData () |
| void | CopyTireStates () |
| void | CalculateForcesMoments (double step) |
| double | CalculateGamma (bool flip) |
| double | CalculatePressureDifference (double p) |
| double | CalculateEffectiveRollingRadius (double omega, double dpi, double Fz) |
| void | CalculateRelaxationLength (double Fz, double gamma, double dfz, double dpi) |
| void | TransientSlipNonlinear (double step, double vx, double vsx, double vsy, double Fx, double Fy, double Fz, double dpi, double dfz) |
| void | TransientSlip (double step, double vx, double vsx, double vsy, double sigma_x, double sigma_y) |
| void | CalculateFrictionScaling (double mu, double Vs) |
| double | ContactPatch (double dpi, double Fz) |
| double | CalculateMx (double Fz, double gamma, double dpi, double Fy) |
| double | CalculateMy (double Fz, double gamma, double dpi, double Fx, double Vcx) |
| double | CalculateMz (double Fz, double kappa, double alpha, double alpha_prime, double gamma, double dfz, double dpi, double phi, double Fx, double Fy, double Vcx) |
| double | CalculateFx (double Fz, double kappa, double alpha, double gamma, double dfz, double dpi, double phi) |
| double | CalculateFy (double Fz, double kappa, double alpha, double gamma, double dfz, double dpi, double phi, double Vcx) |
| double | CalculateFz (double depth, double omega, double gamma, double p, double Fx, double Fy) |
| Protected Member Functions inherited from chrono::vehicle::ChForceElementTire | |
| ChForceElementTire (const std::string &name) | |
| Construct a tire with the specified name. | |
| virtual TerrainForce | GetTireForce () const override |
| Get the tire force and moment. More... | |
| Protected Member Functions inherited from chrono::vehicle::ChTire | |
| ChTire (const std::string &name) | |
| Construct a tire subsystem with given name. | |
| void | CalculateKinematics (const WheelState &wheel_state, const ChCoordsys<> &tire_frame) |
| Calculate kinematics quantities based on the given state of the associated wheel body. More... | |
| double | GetOffset () const |
| Get offset from spindle center. More... | |
| std::shared_ptr< ChTriangleMeshShape > | AddVisualizationMesh (const std::string &mesh_file_left, const std::string &mesh_file_right) |
| Add mesh visualization to the body associated with this tire (a wheel spindle body). More... | |
| Protected Member Functions inherited from chrono::vehicle::ChPart | |
| ChPart (const std::string &name) | |
| Construct a vehicle subsystem with the specified name. | |
| void | AddMass (double &mass) |
| Add this subsystem's mass. More... | |
| void | AddInertiaProperties (ChVector<> &com, ChMatrix33<> &inertia) |
| Add this subsystem's inertia properties. More... | |
| void | ExportBodyList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChBody >> bodies) const |
| Export the list of bodies to the specified JSON document. | |
| void | ExportShaftList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChShaft >> shafts) const |
| Export the list of shafts to the specified JSON document. | |
| void | ExportJointList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLink >> joints) const |
| Export the list of joints to the specified JSON document. | |
| void | ExportCouplesList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChShaftsCouple >> couples) const |
| Export the list of shaft couples to the specified JSON document. | |
| void | ExportMarkerList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChMarker >> markers) const |
| Export the list of markers to the specified JSON document. | |
| void | ExportLinSpringList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkTSDA >> springs) const |
| Export the list of translational springs to the specified JSON document. | |
| void | ExportRotSpringList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLinkRSDA >> springs) const |
| Export the list of rotational springs to the specified JSON document. | |
| void | ExportBodyLoadList (rapidjson::Document &jsonDocument, std::vector< std::shared_ptr< ChLoadBodyBody >> loads) const |
| Export the list of body-body loads to the specified JSON document. | |
| Static Protected Member Functions inherited from chrono::vehicle::ChTire | |
| static bool | DiscTerrainCollision (CollisionType method, const ChTerrain &terrain, const ChVector<> &disc_center, const ChVector<> &disc_normal, double disc_radius, double width, const ChFunction_Recorder &areaDep, ChCoordsys<> &contact, double &depth, float &mu) |
| Perform disc-terrain collision detection, using the specified method. More... | |
| static void | ConstructAreaDepthTable (double disc_radius, ChFunction_Recorder &areaDep) |
| Utility function to construct a loopkup table for penetration depth as function of intersection area, for a given tire radius. More... | |
| static bool | DiscTerrainCollision1pt (const ChTerrain &terrain, const ChVector<> &disc_center, const ChVector<> &disc_normal, double disc_radius, ChCoordsys<> &contact, double &depth, float &mu) |
| Perform disc-terrain collision detection. More... | |
| static bool | DiscTerrainCollision4pt (const ChTerrain &terrain, const ChVector<> &disc_center, const ChVector<> &disc_normal, double disc_radius, double width, ChCoordsys<> &contact, double &depth, float &mu) |
| Perform disc-terrain collision detection considering the curvature of the road surface. More... | |
| static bool | DiscTerrainCollisionEnvelope (const ChTerrain &terrain, const ChVector<> &disc_center, const ChVector<> &disc_normal, double disc_radius, double width, const ChFunction_Recorder &areaDep, ChCoordsys<> &contact, double &depth, float &mu) |
| Collsion algorithm based on a paper of J. More... | |
| Static Protected Member Functions inherited from chrono::vehicle::ChPart | |
| static void | RemoveVisualizationAssets (std::shared_ptr< ChPhysicsItem > item) |
| Erase all visual shapes from the visual model associated with the specified physics item (if any). | |
| static void | RemoveVisualizationAsset (std::shared_ptr< ChPhysicsItem > item, std::shared_ptr< ChVisualShape > shape) |
| Erase the given shape from the visual model associated with the specified physics item (if any). | |
| Protected Attributes inherited from chrono::vehicle::ChMFTire | |
| double | m_kappa |
| longitudinal slip ratio | |
| double | m_alpha |
| slip angle | |
| double | m_gamma |
| camber angle | |
| double | m_gamma_limit |
| limit camber angle | |
| double | m_mu = 1.0 |
| Road friction. | |
| double | m_mu0 = 1.0 |
| bool | useStarInputs = true |
| bool | useTurnSlip = false |
| bool | useIsoRef = false |
| bool | flipSide = false |
| unsigned int | m_use_mode |
| double | m_fx_fb = 0.0 |
| double | m_fy_fb = 0.0 |
| double | m_dpi |
| double | m_dfz |
| double | m_fz_scl |
| double | m_fz |
| double | m_fz_unlim |
| double | LMUX_star = 1.0 |
| double | LMUY_star = 1.0 |
| double | LMUX_prime = 1.0 |
| double | LMUY_prime = 1.0 |
| double | m_Fy_prime = 0.0 |
| double | m_By = 0.0 |
| double | m_Cy = 0.0 |
| double | m_Gyk = 0.0 |
| double | m_SHy = 0.0 |
| double | m_SVy = 0.0 |
| double | m_SVyk = 0.0 |
| double | m_Kxk = 0.0 |
| double | m_Kya = 0.0 |
| double | m_muy = 0.0 |
| double | epsilonx = 0.0 |
| double | epsilony = 0.0 |
| double | m_sigma_x = 0.0 |
| double | m_sigma_y = 0.0 |
| TireData | par |
| TireStates | m_states |
| TireStates | m_states_in |
| ContactData | m_data_in |
| TerrainForce | m_tireforce_out |
| std::shared_ptr< ChVisualShape > | m_cyl_shape |
| visualization cylinder asset | |
| Protected Attributes inherited from chrono::vehicle::ChForceElementTire | |
| ContactData | m_data |
| tire-terrain collision information | |
| TerrainForce | m_tireforce |
| tire forces (in tire contact frame) | |
| ChFunction_Recorder | m_areaDep |
| Protected Attributes inherited from chrono::vehicle::ChTire | |
| std::shared_ptr< ChWheel > | m_wheel |
| associated wheel subsystem | |
| double | m_stepsize |
| tire integration step size (if applicable) | |
| CollisionType | m_collision_type |
| method used for tire-terrain collision | |
| std::string | m_vis_mesh_file |
| name of OBJ file for visualization of this tire (may be empty) | |
| double | m_slip_angle |
| double | m_longitudinal_slip |
| double | m_camber_angle |
| Protected Attributes inherited from chrono::vehicle::ChPart | |
| std::string | m_name |
| subsystem name | |
| bool | m_initialized |
| specifies whether ot not the part is fully constructed | |
| bool | m_output |
| specifies whether or not output is generated for this subsystem | |
| std::shared_ptr< ChPart > | m_parent |
| parent subsystem (empty if parent is vehicle) | |
| double | m_mass |
| subsystem mass | |
| ChMatrix33 | m_inertia |
| inertia tensor (relative to subsystem COM) | |
| ChFrame | m_com |
| COM frame (relative to subsystem reference frame) | |
| ChFrame | m_xform |
| subsystem frame expressed in the global frame | |
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono_vehicle/wheeled_vehicle/tire/MFTire.h
- /builds/uwsbel/chrono/src/chrono_vehicle/wheeled_vehicle/tire/MFTire.cpp
