Description
Constraint between the direction of a FEA node of ChNodeFEAxyzD class, and a ChBodyFrame (frame).
The D direction of the ChNodeFEAxyzD is enforced to stay parallel to a given direction associated to the ChBodyFrame.
#include <ChLinkNodeSlopeFrame.h>
Public Member Functions | |
| ChLinkNodeSlopeFrame (const ChLinkNodeSlopeFrame &other) | |
| virtual ChLinkNodeSlopeFrame * | Clone () const override |
| "Virtual" copy constructor (covariant return type). | |
| virtual unsigned int | GetNumAffectedCoords () override |
| Get the number of scalar variables affected by constraints in this link. | |
| virtual unsigned int | GetNumConstraintsBilateral () override |
| Number of scalar constraints. | |
| virtual ChVectorDynamic | GetConstraintViolation () const override |
| Get the current constraint violations. | |
| ChFrame | GetFrameNodeAbs () const |
| virtual int | Initialize (std::shared_ptr< ChNodeFEAxyzD > node, std::shared_ptr< ChBodyFrame > body, ChVector3d *dir=nullptr) |
| Initialize this constraint, given the node and body frame to join. More... | |
| virtual std::shared_ptr< ChNodeFEAxyzD > | GetConstrainedNode () |
| Get the connected xyzD node (point). | |
| virtual std::shared_ptr< ChBodyFrame > | GetConstrainedBodyFrame () |
| Get the connected body (frame). | |
| ChVector3d | GetDirection () const |
| Get the constrained direction, expressed in the reference coordinates of the body. | |
| void | SetDirectionInBodyCoords (const ChVector3d &dir_loc) |
| Set the constrained direction, expressed in the reference coordinates of the body. More... | |
| void | SetDirectionInAbsoluteCoords (const ChVector3d &dir_abs) |
| Set the constrained direction, expressed in absolute coordinates. More... | |
| ChVector3d | GetReactionOnNode () const |
| Get the reaction torque on the node, expressed in the link coordinate system. | |
| ChVector3d | GetReactionOnBody () const |
| Get the reaction torque on the body, expressed in the link coordinate system. | |
| virtual void | Update (double time, UpdateFlags update_flags) override |
| Update all auxiliary data of the gear transmission at given time. | |
| virtual void | ArchiveOut (ChArchiveOut &archive_out) override |
| Method to allow serialization of transient data to archives. | |
| virtual void | ArchiveIn (ChArchiveIn &archive_in) override |
| Method to allow deserialization of transient data from archives. | |
| virtual void | IntStateGatherReactions (const unsigned int off_L, ChVectorDynamic<> &L) override |
| From item's reaction forces to global reaction vector. More... | |
| virtual void | IntStateScatterReactions (const unsigned int off_L, const ChVectorDynamic<> &L) override |
| From global reaction vector to item's reaction forces. More... | |
| virtual void | IntLoadResidual_CqL (const unsigned int off_L, ChVectorDynamic<> &R, const ChVectorDynamic<> &L, const double c) override |
| Takes the term Cq'*L, scale and adds to R at given offset: R += c*Cq'*L. More... | |
| virtual void | IntLoadConstraint_C (const unsigned int off, ChVectorDynamic<> &Qc, const double c, const double c_vel, bool do_clamp, double recovery_clamp) override |
| Takes the term C, scale and adds to Qc at given offset: Qc += c*C. More... | |
| virtual void | IntToDescriptor (const unsigned int off_v, const ChStateDelta &v, const ChVectorDynamic<> &R, const unsigned int off_L, const ChVectorDynamic<> &L, const ChVectorDynamic<> &Qc) override |
| Prepare variables and constraints to accommodate a solution: More... | |
| virtual void | IntFromDescriptor (const unsigned int off_v, ChStateDelta &v, const unsigned int off_L, ChVectorDynamic<> &L) override |
| After a solver solution, fetch values from variables and constraints into vectors: More... | |
| virtual void | InjectConstraints (ChSystemDescriptor &descriptor) override |
| Register with the given system descriptor any ChConstraint objects associated with this item. | |
| virtual void | ConstraintsBiReset () override |
| Sets to zero the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_C (double factor=1., double recovery_clamp=0.1, bool do_clamp=false) override |
| Adds the current C (constraint violation) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsBiLoad_Ct (double factor=1.) override |
| Adds the current Ct (partial t-derivative, as in C_dt=0-> [Cq]*q_dt=-Ct) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | LoadConstraintJacobians () override |
| Compute and load current Jacobians in encapsulated ChConstraint objects. | |
| virtual void | ConstraintsFetch_react (double factor=1.) override |
| Fetches the reactions from the lagrangian multiplier (l_i) of encapsulated ChConstraints. More... | |
 Public Member Functions inherited from chrono::ChLinkBase Public Member Functions inherited from chrono::ChLinkBase | |
| ChLinkBase (const ChLinkBase &other) | |
| bool | IsValid () |
| Tells if the link data is currently valid. More... | |
| void | SetValid (bool mon) |
| Set the status of link validity. | |
| bool | IsDisabled () |
| Tells if all constraints of this link are currently turned on or off by the user. | |
| virtual void | SetDisabled (bool mdis) |
| User can use this to enable/disable all the constraint of the link as desired. | |
| bool | IsBroken () |
| Tells if the link is broken, for excess of pulling/pushing. | |
| virtual void | SetBroken (bool mon) |
| Set the 'broken' status vof this link. | |
| virtual bool | IsActive () const override |
| Return true if the link is currently active and thereofre included into the system solver. More... | |
| virtual bool | IsRequiringWaking () |
| Tells if this link requires that the connected ChBody objects must be waken if they are sleeping. More... | |
| virtual ChFrame | GetVisualModelFrame (unsigned int nclone=0) const override |
| Get the reference frame (expressed in and relative to the absolute frame) of the visual model. More... | |
| Public Member Functions inherited from chrono::ChPhysicsItem | |
| ChPhysicsItem (const ChPhysicsItem &other) | |
| ChSystem * | GetSystem () const |
| Get the pointer to the parent ChSystem(). | |
| virtual void | SetSystem (ChSystem *m_system) |
| Set the pointer to the parent ChSystem(). More... | |
| virtual bool | IsCollisionEnabled () const |
| Tell if the object is subject to collision. More... | |
| virtual void | AddCollisionModelsToSystem (ChCollisionSystem *coll_sys) const |
| Add to the provided collision system any collision models managed by this physics item. More... | |
| virtual void | RemoveCollisionModelsFromSystem (ChCollisionSystem *coll_sys) const |
| Remove from the provided collision system any collision models managed by this physics item. More... | |
| virtual void | SyncCollisionModels () |
| Synchronize the position and bounding box of any collision models managed by this physics item. | |
| virtual ChAABB | GetTotalAABB () const |
| Get the axis-aligned bounding box (AABB) of this object. More... | |
| virtual ChVector3d | GetCenter () const |
| Get a symbolic 'center' of the object. More... | |
| virtual void | Setup () |
| Perform setup operations. More... | |
| virtual void | ForceToRest () |
| Set zero speed (and zero accelerations) in state, without changing the position. More... | |
| virtual unsigned int | GetNumCoordsPosLevel () |
| Get the number of coordinates at the position level. More... | |
| virtual unsigned int | GetNumCoordsVelLevel () |
| Get the number of coordinates at the velocity level. More... | |
| virtual unsigned int | GetNumConstraints () |
| Get the number of scalar constraints. | |
| virtual unsigned int | GetNumConstraintsUnilateral () |
| Get the number of unilateral scalar constraints. | |
| unsigned int | GetOffset_x () |
| Get offset in the state vector (position part) | |
| unsigned int | GetOffset_w () |
| Get offset in the state vector (speed part) | |
| unsigned int | GetOffset_L () |
| Get offset in the Lagrange multipliers. | |
| void | SetOffset_x (const unsigned int moff) |
| Set offset in the state vector (position part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_w (const unsigned int moff) |
| Set offset in the state vector (speed part) Note: only the ChSystem::Setup function should use this. | |
| void | SetOffset_L (const unsigned int moff) |
| Set offset in the Lagrange multipliers Note: only the ChSystem::Setup function should use this. | |
| virtual void | IntStateGather (const unsigned int off_x, ChState &x, const unsigned int off_v, ChStateDelta &v, double &T) |
| From item's state to global state vectors y={x,v} pasting the states at the specified offsets. More... | |
| virtual void | IntStateScatter (const unsigned int off_x, const ChState &x, const unsigned int off_v, const ChStateDelta &v, const double T, UpdateFlags update_flags) |
| From global state vectors y={x,v} to item's state (and update) fetching the states at the specified offsets. More... | |
| virtual void | IntStateGatherAcceleration (const unsigned int off_a, ChStateDelta &a) |
| From item's state acceleration to global acceleration vector. More... | |
| virtual void | IntStateScatterAcceleration (const unsigned int off_a, const ChStateDelta &a) |
| From global acceleration vector to item's state acceleration. More... | |
| virtual void | IntStateOnEndStep (double T) |
| Called at the end of a step, after the state has been updated. More... | |
| virtual void | IntStateIncrement (const unsigned int off_x, ChState &x_new, const ChState &x, const unsigned int off_v, const ChStateDelta &Dv) |
| Computes x_new = x + Dt , using vectors at specified offsets. More... | |
| virtual void | IntStateGetIncrement (const unsigned int off_x, const ChState &x_new, const ChState &x, const unsigned int off_v, ChStateDelta &Dv) |
| Computes Dt = x_new - x, using vectors at specified offsets. More... | |
| virtual void | IntLoadResidual_F (const unsigned int off, ChVectorDynamic<> &R, const double c) |
| Takes the F force term, scale and adds to R at given offset: R += c*F. More... | |
| virtual void | IntLoadResidual_Mv (const unsigned int off, ChVectorDynamic<> &R, const ChVectorDynamic<> &w, const double c) |
| Takes the M*v term, multiplying mass by a vector, scale and adds to R at given offset: R += c*M*w. More... | |
| virtual void | IntLoadLumpedMass_Md (const unsigned int off, ChVectorDynamic<> &Md, double &err, const double c) |
| Adds the lumped mass to a Md vector, representing a mass diagonal matrix. More... | |
| virtual void | IntLoadConstraint_Ct (const unsigned int off, ChVectorDynamic<> &Qc, const double c, const double c_vel) |
| Takes the term Ct, scale and adds to Qc at given offset: Qc += c*Ct. More... | |
| virtual void | InjectVariables (ChSystemDescriptor &descriptor) |
| Register with the given system descriptor any ChVariable objects associated with this item. | |
| virtual void | InjectKRMMatrices (ChSystemDescriptor &descriptor) |
| Register with the given system descriptor any ChKRMBlock objects associated with this item. | |
| virtual void | LoadKRMMatrices (double Kfactor, double Rfactor, double Mfactor) |
| Compute and load current stiffnes (K), damping (R), and mass (M) matrices in encapsulated ChKRMBlock objects. More... | |
| virtual void | VariablesFbReset () |
| Sets the 'fb' part (the known term) of the encapsulated ChVariables to zero. | |
| virtual void | VariablesFbLoadForces (double factor=1) |
| Adds the current forces (applied to item) into the encapsulated ChVariables, in the 'fb' part: qf+=forces*factor. | |
| virtual void | VariablesQbLoadSpeed () |
| Initialize the 'qb' part of the ChVariables with the current value of speeds. More... | |
| virtual void | VariablesFbIncrementMq () |
| Adds M*q (masses multiplied current 'qb') to Fb, ex. More... | |
| virtual void | VariablesQbSetSpeed (double step=0) |
| Fetches the item speed (ex. More... | |
| virtual void | VariablesQbIncrementPosition (double step) |
| Increment item positions by the 'qb' part of the ChVariables, multiplied by a 'step' factor. More... | |
| virtual void | ConstraintsBiLoad_Qc (double factor=1) |
| Adds the current Qc (the vector of C_dtdt=0 -> [Cq]*q_dtdt=Qc ) to the known term (b_i) of encapsulated ChConstraints. | |
| virtual void | ConstraintsFbLoadForces (double factor=1) |
| Adds the current link-forces, if any, (caused by springs, etc.) to the 'fb' vectors of the ChVariables referenced by encapsulated ChConstraints. | |
| Public Member Functions inherited from chrono::ChObj | |
| ChObj (const ChObj &other) | |
| int | GetIdentifier () const |
| Get the unique integer identifier of this object. More... | |
| void | SetTag (int tag) |
| Set an object integer tag (default: -1). More... | |
| int | GetTag () const |
| Get the tag of this object. | |
| void | SetName (const std::string &myname) |
| Set the name of this object. | |
| const std::string & | GetName () const |
| Get the name of this object. | |
| double | GetChTime () const |
| Gets the simulation time of this object. | |
| void | SetChTime (double m_time) |
| Sets the simulation time of this object. | |
| void | AddVisualModel (std::shared_ptr< ChVisualModel > model) |
| Add an (optional) visualization model. More... | |
| std::shared_ptr< ChVisualModel > | GetVisualModel () const |
| Access the visualization model (if any). More... | |
| void | AddVisualShape (std::shared_ptr< ChVisualShape > shape, const ChFrame<> &frame=ChFrame<>()) |
| Add the specified visual shape to the visualization model. More... | |
| std::shared_ptr< ChVisualShape > | GetVisualShape (unsigned int i) const |
| Access the specified visualization shape in the visualization model (if any). More... | |
| virtual unsigned int | GetNumVisualModelClones () const |
| Return the number of clones of the visual model associated with this object. More... | |
| void | AddCamera (std::shared_ptr< ChCamera > camera) |
| Attach a camera to this object. More... | |
| std::vector< std::shared_ptr< ChCamera > > | GetCameras () const |
| Get the set of cameras attached to this object. | |
| void | UpdateVisualModel () |
| Utility function to update only the associated visual assets (if any). | |
| virtual std::string & | ArchiveContainerName () |
Additional Inherited Members | |
| Protected Member Functions inherited from chrono::ChObj | |
| int | GenerateUniqueIdentifier () |
| Protected Attributes inherited from chrono::ChLinkBase | |
| bool | disabled |
| all constraints of link disabled because of user needs | |
| bool | valid |
| link data is valid | |
| bool | broken |
| link is broken because of excessive pulling/pushing. | |
| Protected Attributes inherited from chrono::ChPhysicsItem | |
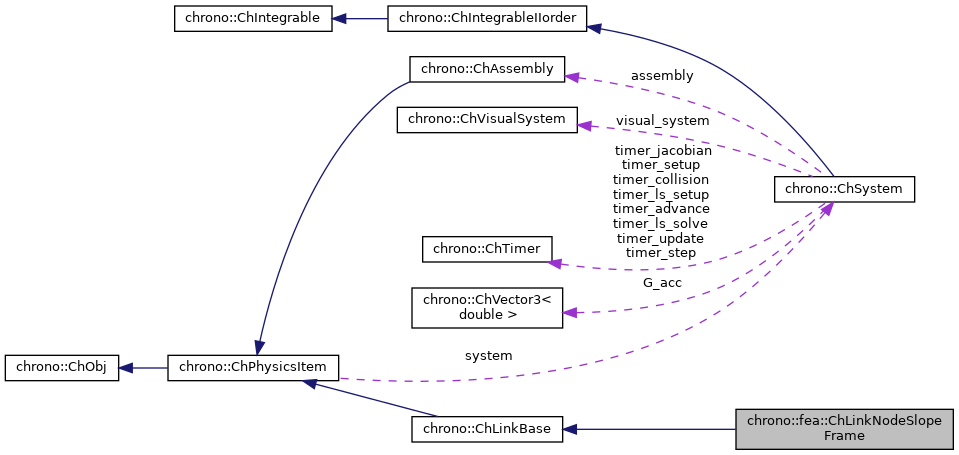
| ChSystem * | system |
| parent system | |
| unsigned int | offset_x |
| offset in vector of state (position part) | |
| unsigned int | offset_w |
| offset in vector of state (speed part) | |
| unsigned int | offset_L |
| offset in vector of Lagrange multipliers | |
| Protected Attributes inherited from chrono::ChObj | |
| double | ChTime |
| object simulation time | |
| std::string | m_name |
| object name | |
| int | m_identifier |
| object unique identifier | |
| int | m_tag |
| user-supplied tag | |
| std::shared_ptr< ChVisualModelInstance > | vis_model_instance |
| instantiated visualization model | |
| std::vector< std::shared_ptr< ChCamera > > | cameras |
| set of cameras | |
Member Function Documentation
◆ ConstraintsFetch_react()
|
overridevirtual |
Fetches the reactions from the lagrangian multiplier (l_i) of encapsulated ChConstraints.
Mostly used after the solver provided the solution in ChConstraints. Also, should convert the reactions obtained from dynamical simulation, from link space to intuitive react_force and react_torque.
Reimplemented from chrono::ChPhysicsItem.
◆ Initialize()
|
virtual |
Initialize this constraint, given the node and body frame to join.
The constrained direction is the actual direction of the node (unless otherwise defined, using the optional 'dir' parameter). Note: the node and body must belong to the same ChSystem.
- Parameters
-
node xyzD node to join (with the direction) body body (frame) to join dir direction in absolute coordinates
◆ IntFromDescriptor()
|
overridevirtual |
After a solver solution, fetch values from variables and constraints into vectors:
- Parameters
-
off_v offset for v v vector to where the q 'unknowns' term of the variables will be copied off_L offset for L L vector to where L 'lagrangian ' term of the constraints will be copied
Reimplemented from chrono::ChPhysicsItem.
◆ IntLoadConstraint_C()
|
overridevirtual |
Takes the term C, scale and adds to Qc at given offset: Qc += c*C.
- Parameters
-
off offset in Qc residual Qc result: the Qc residual, Qc += c*C c the scaling factor c_vel the scaling factor if the constraint is at speed level do_clamp apply clamping to c*C? recovery_clamp value for min/max clamping of c*C
Reimplemented from chrono::ChPhysicsItem.
◆ IntLoadResidual_CqL()
|
overridevirtual |
Takes the term Cq'*L, scale and adds to R at given offset: R += c*Cq'*L.
- Parameters
-
off_L offset in L multipliers R result: the R residual, R += c*Cq'*L L the L vector c a scaling factor
Reimplemented from chrono::ChPhysicsItem.
◆ IntStateGatherReactions()
|
overridevirtual |
From item's reaction forces to global reaction vector.
- Parameters
-
off_L offset in L vector L L vector of reaction forces
Reimplemented from chrono::ChPhysicsItem.
◆ IntStateScatterReactions()
|
overridevirtual |
From global reaction vector to item's reaction forces.
- Parameters
-
off_L offset in L vector L L vector of reaction forces
Reimplemented from chrono::ChPhysicsItem.
◆ IntToDescriptor()
|
overridevirtual |
Prepare variables and constraints to accommodate a solution:
- Parameters
-
off_v offset for v and R v vector copied into the q 'unknowns' term of the variables R vector copied into the F 'force' term of the variables off_L offset for L and Qc L vector copied into the L 'lagrangian ' term of the constraints Qc vector copied into the Qb 'constraint' term of the constraints
Reimplemented from chrono::ChPhysicsItem.
◆ SetDirectionInAbsoluteCoords()
| void chrono::fea::ChLinkNodeSlopeFrame::SetDirectionInAbsoluteCoords | ( | const ChVector3d & | dir_abs | ) |
Set the constrained direction, expressed in absolute coordinates.
This function may be called only after initialization.
◆ SetDirectionInBodyCoords()
| void chrono::fea::ChLinkNodeSlopeFrame::SetDirectionInBodyCoords | ( | const ChVector3d & | dir_loc | ) |
Set the constrained direction, expressed in the reference coordinates of the body.
This function may be called only after initialization.
The documentation for this class was generated from the following files:
- /builds/uwsbel/chrono/src/chrono/fea/ChLinkNodeSlopeFrame.h
- /builds/uwsbel/chrono/src/chrono/fea/ChLinkNodeSlopeFrame.cpp
